What Most AGV & AMR Builders Get Wrong (And Why It Matters)

In the design of Automated Guided Vehicles (AGVs) and Autonomous Mobile Robots (AMRs), thousands of dollars are invested in high-end LiDAR, sophisticated SLAM algorithms, and powerful drive motors. But if the caster choice is wrong, the robot will fail on the warehouse floor regardless of how good the software is.

Below are the four most common traps engineers fall encounter and how to avoid them.
Mistake 1: Treating a Robot Like A Manual Cart

Standard casters are engineered for human operators who can muscle through a jammed swivel or a stiff wheel. AGVs and AMRs do not have that luxury. Because a robot's navigation software relies on predictable movements, even small amounts of mechanical resistance can cause a failure. This is where "slop" becomes a critical issue. This mechanical play in a loose swivel allows the wheel to wander, pulling the robot off course and making consistent docking for charging or pallet pickup a nearly impossible task.
The Impact of 24/7 Duty Cycles
While manual carts are stationary the majority of the time, AGVs and AMRs typically operate 24/7. Traditional casters are not designed for this relentless duty cycle. Under continuous operation:
- Heat generated by friction causes standard bearings to seize.
- Constant motion leads to wheel tread delamination.
Mistake 2: Ignoring Debris and Potential Obstructions

Testing on a polished shop floor rarely reflects the reality of a working warehouse. Industrial environments are obstacle courses of zip ties, expansion joints, and metal shavings. Without integrated thread guards or proper clearance, a single zip tie can jam an axle. This forces drive motors to brute force the turn, which grinds flat spots into the treads and induces constant vibration.
Navigation Interference
The noise from these flat spots eventually throws off internal navigation sensors by generating "ghost obstacles" in the map. This causes the robot to stop or stutter for no apparent reason.
Mistake 3: Choosing the Wrong Wheels

Material choice for drive and auxiliary wheels is a delicate balance of physics. Hard materials, such as nylon, offer low rolling resistance but vibrate excessively. Conversely, soft rubber is prone to compression setting. If a robot remains stationary under a heavy payload, the material deforms and creates a permanent "speed bump" that drains battery life to overcome.
Finding the Durometer "Sweet Spot"
High quality polyurethane is the industry standard for a reason, but the specific hardness must scale with the robot's weight:
- Shore 85A to 95A: These mid-range durometers provide the necessary grip for sharp turns while remaining firm enough for standard industrial loads.
- Shore 70D: For heavy-duty applications, shifting to the Shore D scale ensures the wheel is hard enough to prevent tread compression and flat-spotting under extreme weight.
Tread profile and width also dictate efficiency. A wide single wheel must scrub or drag against the floor to pivot, but switching to a multi wheel caster allows wheels to spin independently. This cuts swivel resistance by up to 50 percent and significantly reduces the load on the drive system.
Mistake 4: Overlooking Swivel Performance
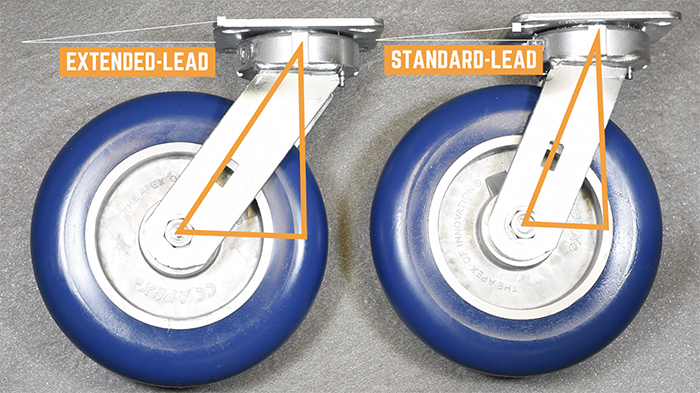
Swivel offset, the horizontal distance between the top plate center and the wheel axle, is a critical factor in battery efficiency. This offset acts like a wrench handle; a longer handle gives drive motors more leverage to snap the wheel into trailing position.
Avoiding Torque Spikes
Without sufficient offset, motors must work significantly harder to break the initial friction when aligning a caster to the direction of travel. This results in:
- Massive torque spikes that deplete battery life.
- Increased stress on motor controllers.
- "Swivel chatter" that leads to premature hardware failure.
The Bottom Line: Total Cost of Ownership

These issues rarely manifest during a short demo, but they become glaringly obvious in the field. A commodity caster often carries a much higher Total Cost of Ownership when factoring in the cost of field repairs, battery degradation, and robot downtime.
At Caster Connection, our Caster Nerds take a hands-on approach to ensure your mobility solutions actually hold up over time. We help you finetune your robot’s casters, matching the hardware to your specific floor conditions, duty cycles, and more, before they become a problem. Addressing these mechanical details early ensures your robot stays in operation once it leaves the lab.
Request a Caster Needs Evaluation below to make sure your next project keeps rolling.